NOC-NOC 面向性能最优的分布式事务 (sigmod 24)
NOC-NOC:面向性能最优的分布式事务(sigmod 24)
1 摘要
以前的分布式事务性能最优的工作都致力于研究优化事务的读操作,但忽略了影响写整体性能的关键因素–写操作,本文通过优化写操作进一步提高分布式事务的性能;
提出了一个新的设计目标:NOC-NOC
利用 双视图 + 版本向量技术 实现了两个满足这一设计目标的新事务算法
2 介绍
只读事务优化文章:
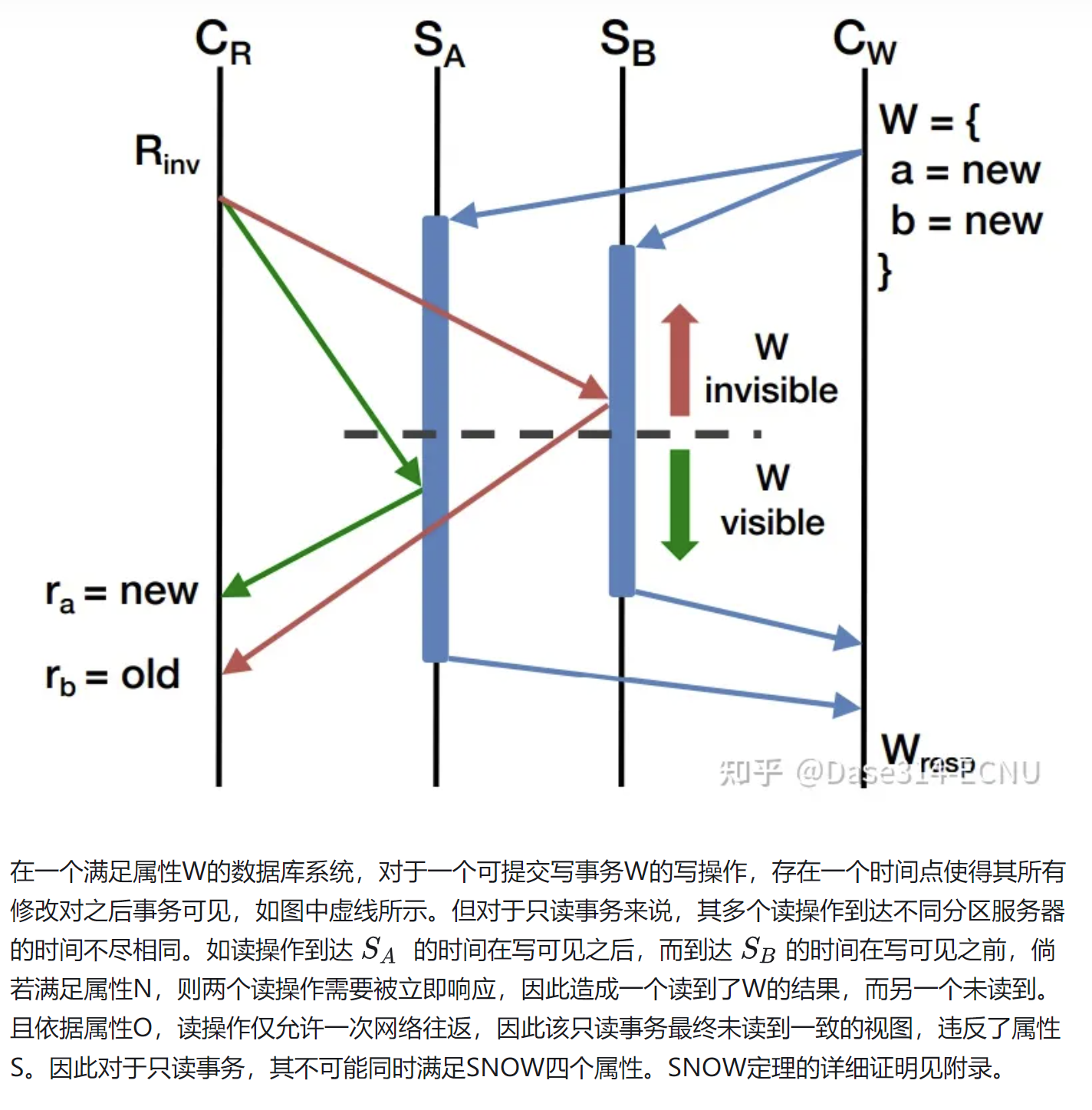
SNOW 不可能定理:只读事务优化的4个属性无法同时满足,只能同时满足其中3个:
- S 严格可串行化 strict serializability,要求事务之间按开始时间严格有序,不存在内部操作的并发执行,比如查询余额一定在转账之后;
- N 操作非阻塞 Non-Blocking Operation,要求读操作能立刻被响应,不会因为等待其他节点或锁占用而延迟;
- O 每个读操作仅有单个回复 One Response Per Read,要求读操作只读一个版本;
- W 允许同时存在冲突写事务 Write Transactions that Conflict,要求允许对同一个数据项更改的写事务在并发进行‘
满足 N+O 的算法:延迟最低的只读事务算法
满足 S+W 的算法:功能最强的只读事务算法,因为其简化了上层应用的开发
NOCS 定理:只读事务的最优性能为:在一致性视图的情况下,同时满足 NOC 三个属性:
- N 非阻塞 non-blocking
- O 单轮通信 one round communication
- C 常量元数据 constant amount of data,需要满足跨分区数据的一致性读的视图
元数据用于计算只读事务所需的一致性视图,比如事务ID,时间戳;
作者进行的实验:
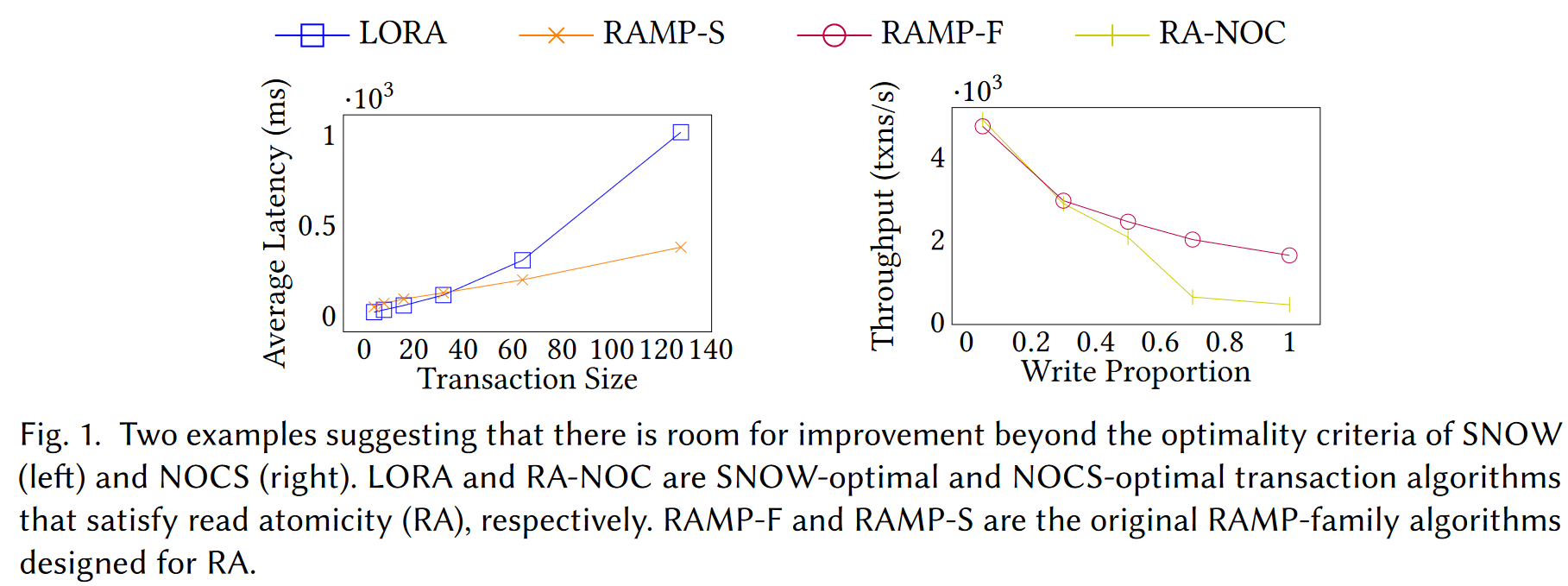
LORA 和 RA-NOC 在事务数量小的情况下,或写比例小的情况下,延迟较低,吞吐量较高;
但是当事务数量增加并且写事务增多时,整体的延迟在变大,吞吐量在降低;
由于 NOC 仅优化了只读事务,在写事务占比较多时,锁竞争会导致整体的吞吐量降低;
左右两幅图都是既有只读事务,又有写的事务;
近几年提出的几个隔离级别:
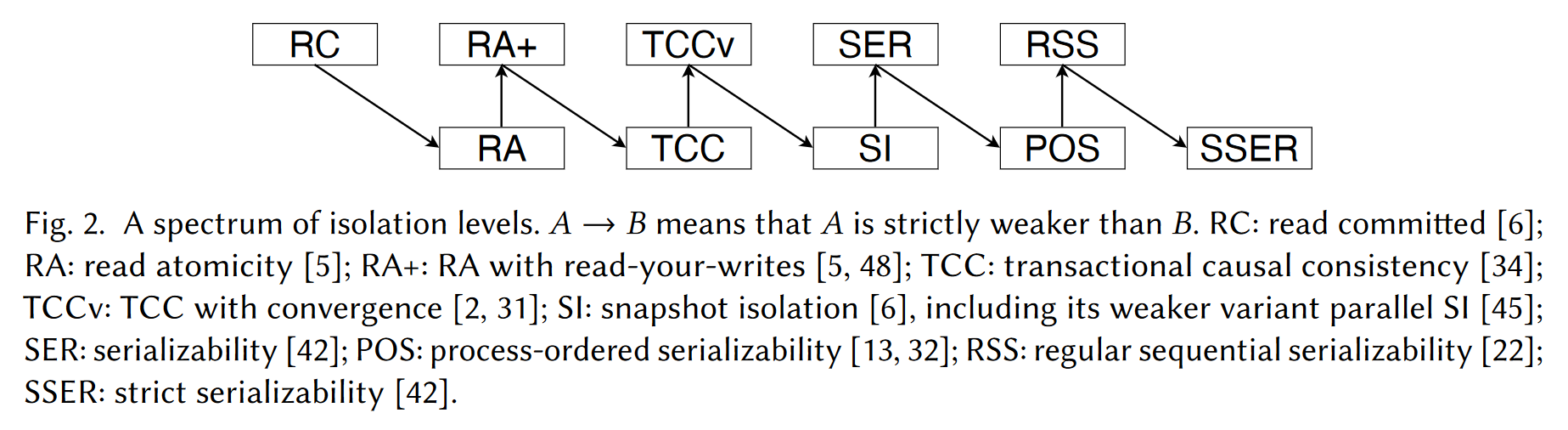
RC:读已提交
RA:读原子性:在RC的基础上,避免了断裂读取异常 fractured reads
关于断裂读取异常:read committed 可能会导致下面的情景
| T1 | T2 |
|---|---|
| begin ( x = 1, y = 1 ) | begin ( x = 1, y = 1 ) |
| read x = 1 | |
| write x = 2 | |
| write y = 3 | |
| commit | |
| read y = 3 | |
| commit |
RA:T2 要么对 T1 所有更新操作感知,要么都不感知,这里之前读了 x = 1,那么后面对 y 的读取只能是1;
RA+:在RA隔离级别的基础上,同时能够保证 read your writes
read your write (Session Guarantees for Weakly Consistent Replicated Data 94)
没有 read your write 的情景:通常出现在弱一致性系统中
一个用户改了个新的密码,在重新登录的过程中,由于密码副本是分布式存储,有一个副本异步更新的较慢,用户输入新更改的密码去登录,结果查询到的是那个未来得及更新的副本,导致收到密码无效。而 read your write 能够保证客户端在登录过程中始终读取最新的密码
TCC:事务之间执行能够保证因果一致性
能在并发情况下,满足下面两个事务的顺序关系,即先执行T1,后执行T2
T1:用户A浏览了商品X并将其添加到购物车
T2:用户B查看了用户A的购物车,并在此基础上给用户A推荐了相关商品Y
TCCv:TCC基础上使其收敛
NOC-NOC标准:
只读事务需要满足前面三个原则(第一个NOC)
并且由SNOW定理证明的,在存在冲突写事务的情况下,只读事务算法只能满足 N+O+W
本文在SNOW基础上,写事务算法如果满足写的 NOC,能够最大化提升系统性能;
定理3.1 在SI隔离级别下,没有事务算法能够同时满足 NOC-NOC 这6个准则
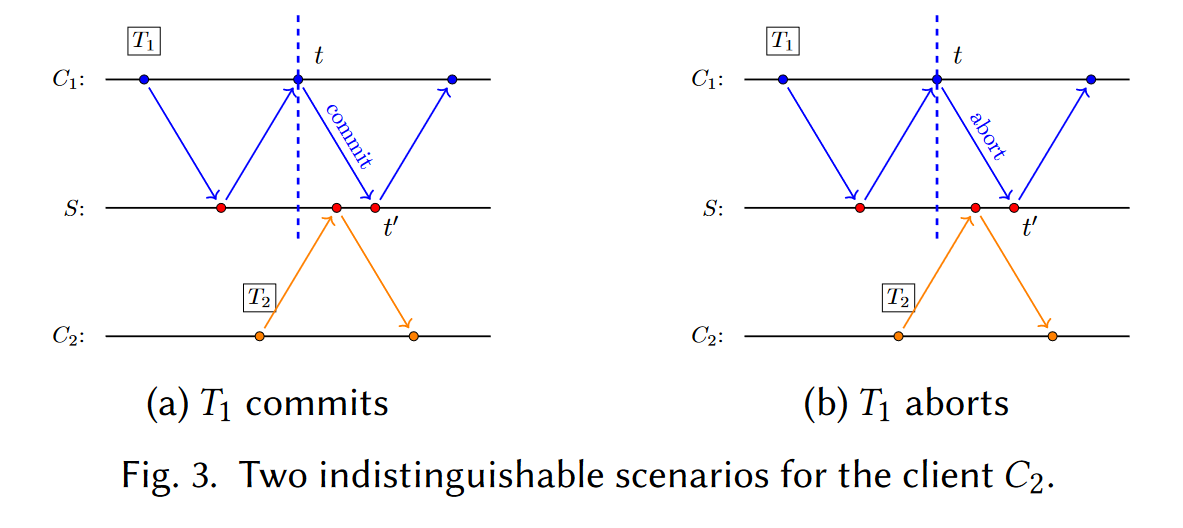
定理3.2 RC隔离级别下,没有事务算法能够同时满足 NOC-NOC 这6个准则 + 全局可见性
图3是在RC隔离级别下,T2读取到的数据应该是一样的,都是最开始的数据;
在满足NOC-NOC + 全局可见性下,T2会读到T1未提交的数据,违背了RC;
否则,如果T2读到的是原始数据,在T1先开始T2后开始的情况下,在a中T2读不到T1更新的数据,也违背了NOC-NOC里的 $$O_R$$
本文设计了两个算法,分别在 RA+ 和 TCCv 隔离级别下满足 NOC-NOC 6个准则的算法
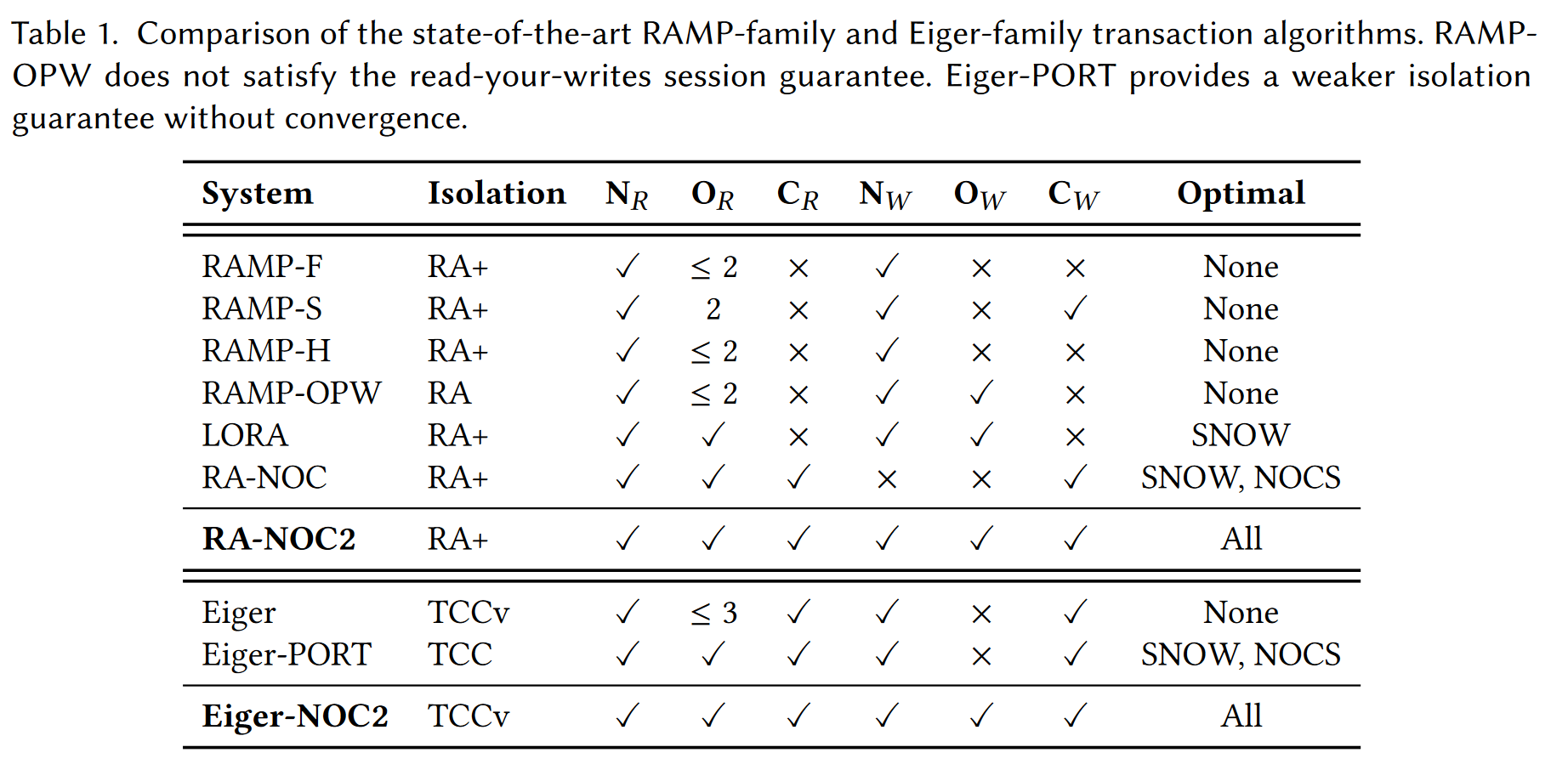
RA-NOC2 算法
LSV:局部安全视图
GSV:全局安全视图
疑问:(GPT)
1、事务算法指的是?并发控制算法
2、RA会出现不可重复读吗?会,仅比RC多个避免 fracture read
3、它们跟2PL,OCC有什么联系和区别?
RAMP-family 和 Eiger-family 算法主要用于分布式环境下的事务处理,以解决分区数据一致性和可靠性的问题;(数据分布在不同的分区)
而2PL 和 OCC 算法通常用于单机或分布式环境下的本地事务处理,以解决并发控制和一致性问题;
4、如何理解TCCv的收敛?
RAMP算法提出的背景:
传统的隔离级别是针对单节点环境下的异常定义的,而分布式数据库会出现新的异常
主要原因在于多个节点上同一个事务的更新可能不是原子可见的
受网络等影响,某些节点未完成更新,使得同一个读操作读分布在不同副本上的数据时,读取的版本不一致;
RAMP算法保证了多节点上读取结果的一致性;